こんにちは。ころすけです。
前回の記事でV1(離陸決心速度)の決め方について解説しました。
2-320x180.jpg)
-320x180.jpg)
今回はV1と共に離陸速度として使われるVR(機首上げ速度)とV2(安全離陸速度)について解説したいと思います。
それでは始めましょう。
V2(安全離陸速度)は離陸してから35ftまでに到達しなければならない速度
まず始めにV2(安全離陸速度)から解説します。
なぜVRが先じゃないのか?と思われるかもしれませんが、VRはV2の大きさに合わせて後から決まるイメージなので、V2を先に解説した方が順序が良いのです。
さて、今回も離陸速度を決める上で大前提となる大切な条件があります。それは、
「離陸操作中にエンジン1基が故障した場合も想定すること」です。
これはV1を決定する際も同じですが、飛行機の離陸にとって最悪のケースは途中でエンジンの推力が失われてしまうことです。
仮にエンジン故障が機首上げ直前や機体の浮揚後に発生した場合でも、残ったエンジンだけで安全に離陸を継続できるように想定していなければならないのです。
では、具体的にV2はどのような条件から決定されるのでしょうか?
以下がV2を決定する主な条件になります。
・失速速度に対して所定の余裕を持った速度以上であること
・VMCAに対して所定の余裕を持った速度以上であること
・着陸装置(ランディングギア)を格納した状態で所定の上昇勾配が得られること
大まかに条件を見ると、1つ目と2つ目ではいずれもV2は「所定の速度以上であること」と定められており、V2には下限値が設定されていることが分かります。
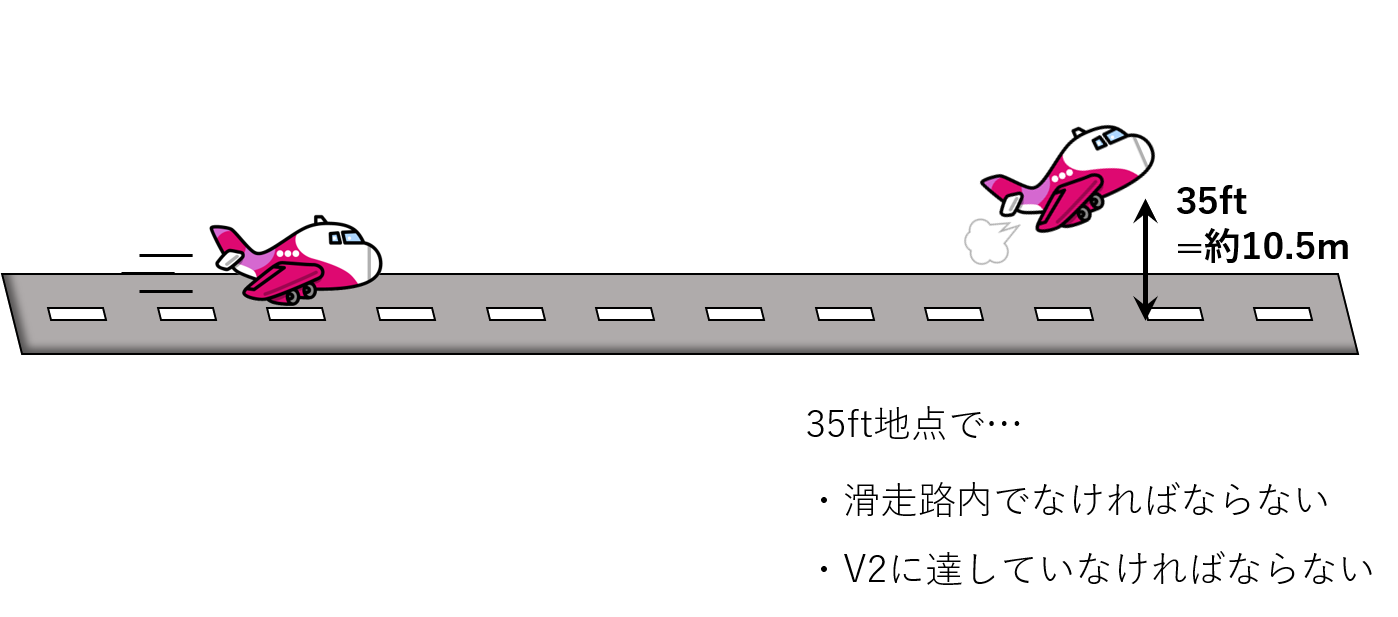
飛行機は離陸する際、滑走路の長さ以内で地上から35ft(約10.5m)の高さに達していないといけないのですが、その時に同時に所定の速度以上に加速していなければならないのです。
V2を決定する条件の詳細。ポイントは離陸重量と離陸Flap。
それでは次に、3つの条件の詳細を順番に見ていきましょう。
1. 失速速度に対して所定の余裕があること
失速とは簡単に言えば、機首を上げ過ぎて翼が空気を受ける角度が大きくなりすぎてしまった結果、翼の表面を流れる空気がきれいに流れなくなって揚力が失われてしまう現象のことを指します。
(失速については以下の記事で詳しく紹介しています↓)


失速の本質は翼と気流の当たる角度の問題なのですが、実は飛行速度とも大きく関連しています。
というのも、飛行機は遅く飛ぼうとすればするほど、機首を上げて翼と空気が当たる角度をつけてやらないと必要な揚力が得られないからです。
つまり、飛行機の速度が遅いということは、それだけ失速に近い状態で飛んでいるということを意味しています。
通常、飛行機はある速度以下になると翼と気流の角度(迎角と言います)が限界を超えて失速に入るのですが、この時の速度を失速速度と呼んでいます。
と言うことは逆に、速度が速ければそれだけ失速に対して余裕があるというわけです。
飛行機の離陸では35ftに達した時点(V2に達した時点)で、2発または3発エンジン機では失速速度の1.13倍、4発エンジン機では1.08倍以上の速度である必要があります。
ここでちょっと補足ですが、この失速速度という言葉には注意が必要で、かつては2、3発機では失速速度の1.2倍、4発機では1.15倍という値が使われていました。
実はこれ、制限値自体が変わったわけではなく、失速とみなす基準の速度が変わっただけなのです。
下のグラフでCLというのは揚力の大きさのことだと思ってください。
飛行機の翼は気流との角度(迎角)を大きくしていくと揚力が大きくなるのですが、あるところを過ぎるとそれ以上揚力が大きくならなくなります。
実はここが翼表面の空気が乱れ始める時点で、それ以上は徐々に機体の重さを支えられなくなるので、この時の速度を1g失速速度=VS1gと呼んでいます。
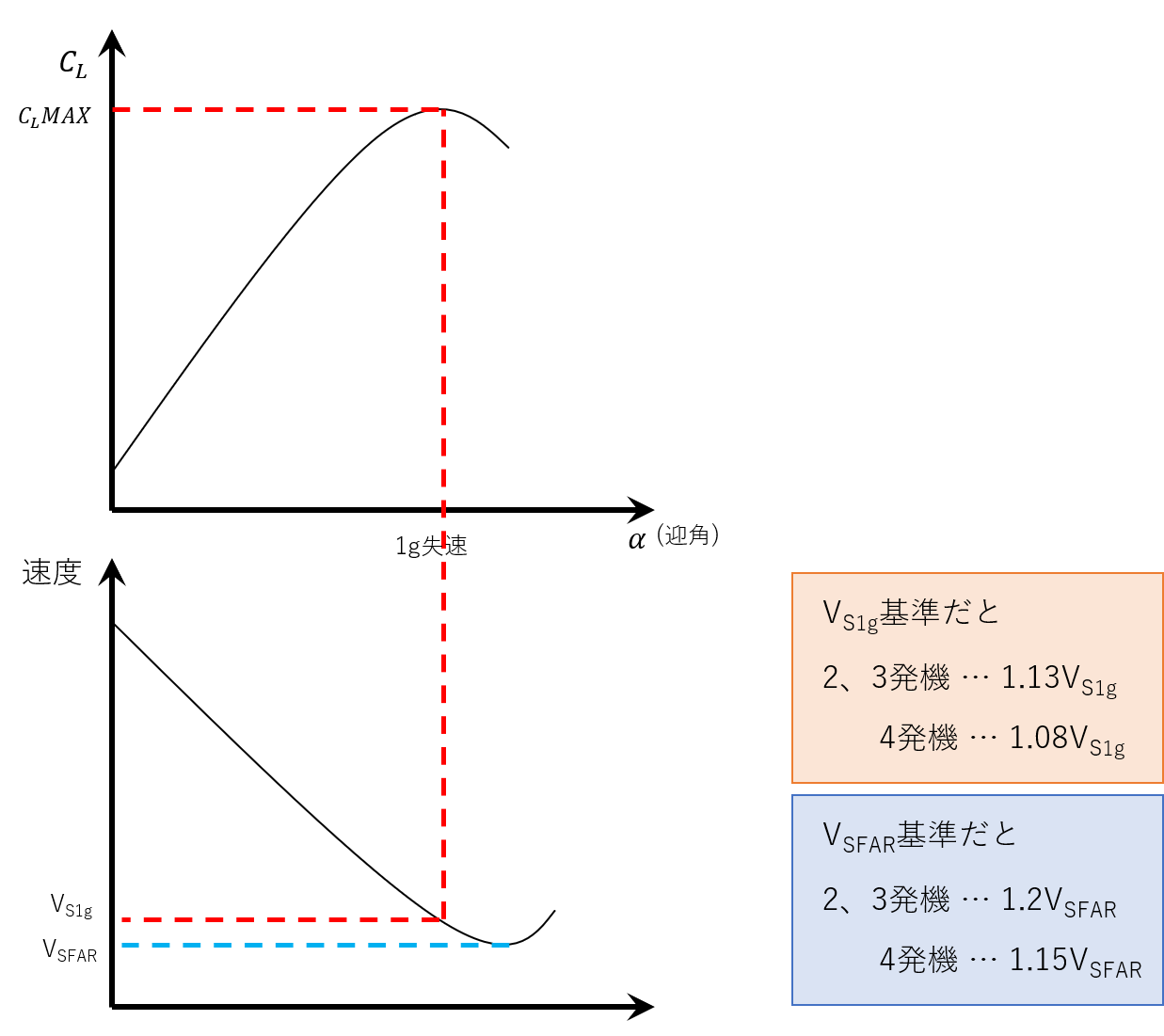
ですがVS1gではまだ完全に失速しているわけではなく、もう少し機首を上げると機体は完全に失速するのですが、この時に飛行機は自動的に機首を下げて速度を回復するようにバランスが調整されています。
この過程で最も減少した時の速度のことをVSFARと言うのですが、昔はこのVSFARを基準に余裕度が決められていたのです。
なので古い教科書を読んだりすると、V2は失速速度の1.2倍以上などと書いてある場合がありますが、それは基準となる失速速度が変わっただけで制限値自体は変わっていないのです。
話が逸れましたが、この失速速度は何で決まるかと言うと、機体重量と離陸Flapの2つが大きく関わってきます。
厳密には離陸推力の大きさなども若干影響しているようですが、基本的にはこの2つと思っていただいて結構です。
具体的には以下のように失速速度は変化します。
・機体重量が重いと失速速度は大きくなる
・浅いFlapを使うと失速速度は大きくなる
選択できる離陸Flapの名称は機種により異なりますが、例えばB777では離陸Flapは5°、15°、20°の3種類から選択が可能です。
5°のような浅いFlapを使うと失速速度が大きくなるので、それだけV2も大きくしてあげなければいけないのです。
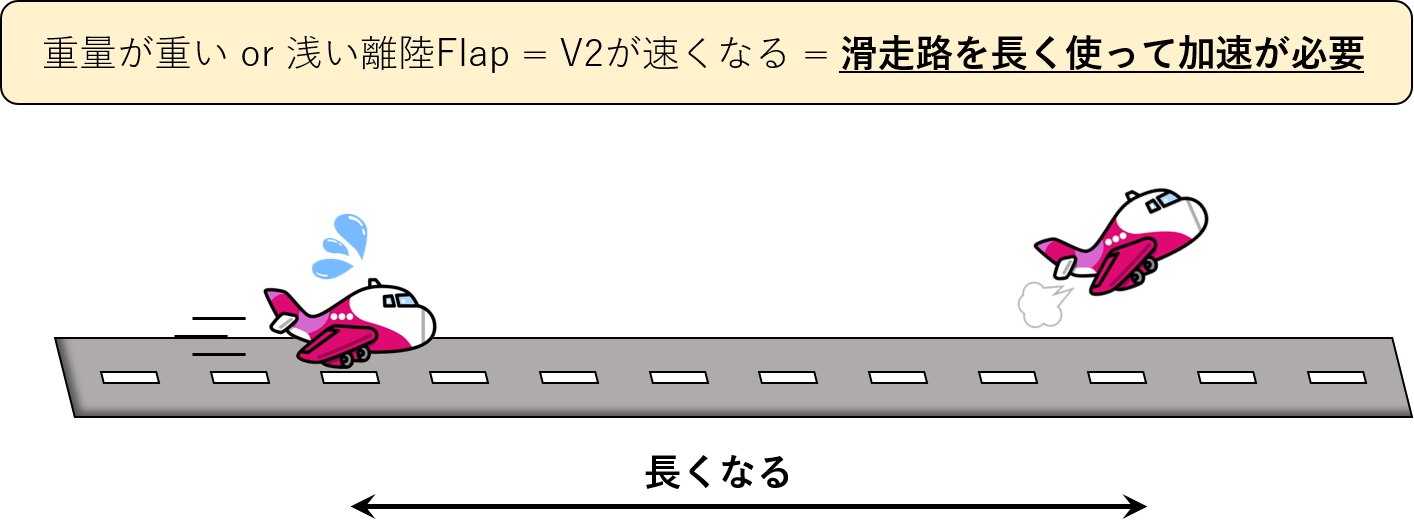
このように機体重量が重かったり、Flapが浅かったりしてV2を速くする必要がある場合は、それだけ滑走路を長く使って機首上げまでに加速させる必要があるのです。
このように速度が速くなると必要な滑走路が長くなってしまうので、失速速度に対するV2の余裕はできるだけ小さく、2発機であれば下限値である1.13倍近辺とすることが一般的です。
2. VMCAに対して所定の余裕があること
続いて2つ目ですが、まずVMCAとは何でしょうか?
下の図を見てください。
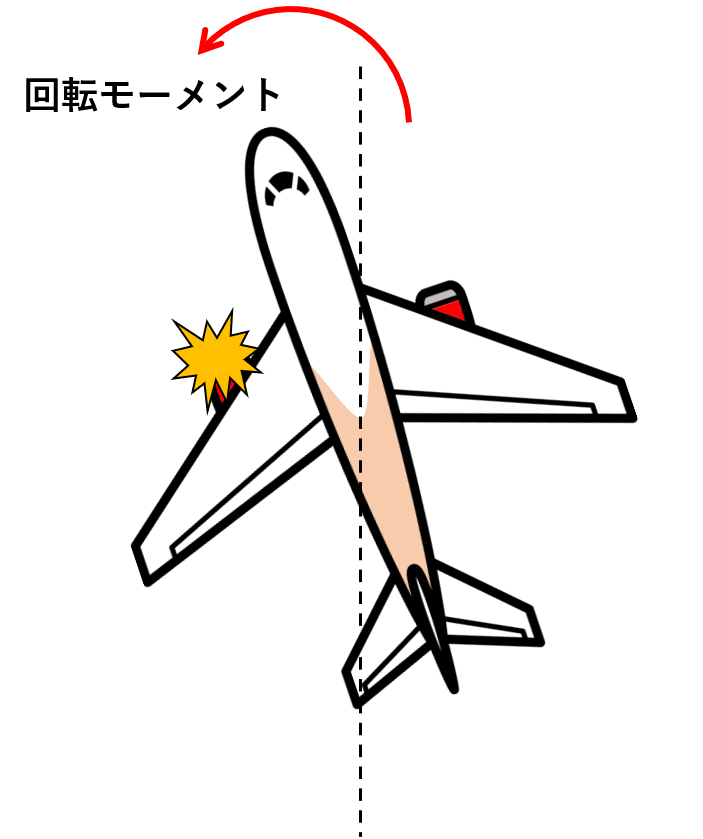
冒頭で、離陸速度の決定では必ずエンジンが1基故障することを想定すると言いました。
空中でエンジンが1基故障した場合、左右の推力のバランスが崩れるので図のように飛行機の機首は進行方向から振られてしまいます。

このような場合、回転と逆方向のラダーを踏んで機首をもとに戻してあげる必要があります。
このラダーによる復元力は速度の大きさによるので、推力のアンバランスに逆らうだけの力を得るためにはある程度の速度が必要です。
この速度がVMCA(Minimum Control Speed in Air)で、V2はこのVMCAのさらに1.1倍以上でなければならないと決められているのです。
ですがV2は通常、先ほどの失速速度に対する制限の方が厳しい場合がほとんどで、実際にはVMCAによる制限を意識することはあまりありません。
3. ランディングギアを上げた状態で所定の上昇勾配を得られること
最後は上昇勾配に関する条件です。
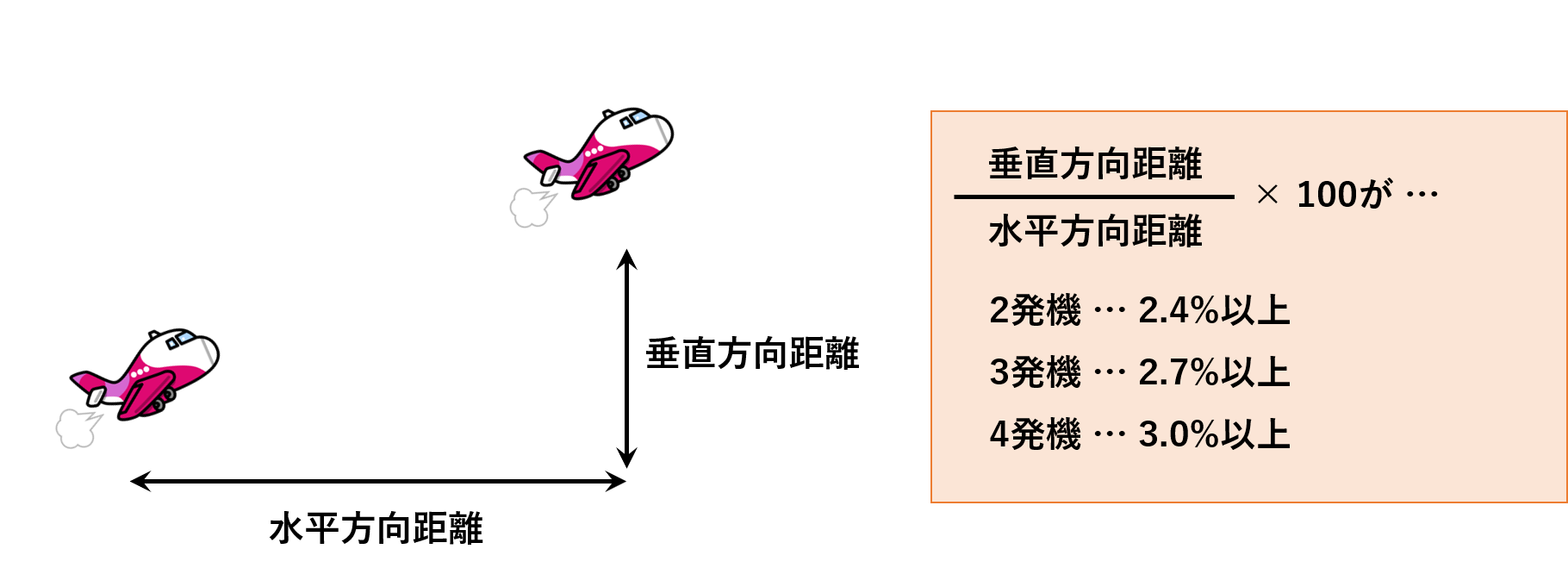
上昇勾配とは垂直方向の上昇高度を水平方向の進出距離で割ったパーセンテージになります。
基準上では機体が35ftに達した時点からランディングギアを格納すると想定するのですが、ギアが格納しきった状態で2発機は2.4%、3発機は2.7%、4発機は3.0%以上の上昇勾配が必要になります。
この上昇勾配は機体重量や使う離陸Flapなどによって以下のように変化します。
・機体重量が重いと上昇勾配は悪くなる
・深いFlapを使うと上昇勾配は悪くなる
・弱い推力を使うと上昇勾配は悪くなる
・V2が遅いと上昇勾配は悪くなる
もしもこの上昇勾配の条件を満たせない場合、通常であればより浅いFlapを使ったり大きな離陸推力に変更したりすることが一般的です。
先ほど失速速度に対する制限のところで述べたように、基本的にV2は失速速度に対して最低限の余裕を持った速度とすることが一般的なのです。
ですが近年、タブレット端末式の性能計算ソフトが普及して複雑な計算が素早くできるようになった結果、V2の失速速度に対する余裕を大きくして(V2を敢えて速くして)上昇勾配を確保する方法が主流になりつつあります。
例えば2発機であれば通常、V2を失速速度の1.13倍としているところをもう少し大きな倍数を使い、V2をより大きくすることで上昇勾配の条件をクリアさせるのです。
これは機種によって呼称が様々ですが、Improved V2とか、Optimum V2などと呼ばれています。
VR(機首上げ速度)は機首上げを開始する速度
V2の解説が終わったところで次はVR(機首上げ速度)について解説しましょう。
機首上げは英語でローテーションと言いますので、VRのことはローテーション速度とも呼ばれます。
パイロットはV1に達すると操縦桿を握っていない方のパイロットが「ブイワン!」とコールする手順になっているのですが、VRに達した時は「ローテート!」とコールします。
(航空会社によっては「ブイアール!」とコールするところもあるようです。)
ローテーション速度はその名のとおり、パイロットが機首上げ操作を開始する速度になるわけですが、これを決定するための要素は以下のとおりです。
・地上から35ftに到達するまでにV2に達することができること
・VMCAに対して1.05倍の余裕を持った速度以上であること
・VLOFにおいてVMUに対して所定の余裕を持った速度以上であること
先ほど、V2は基本的に失速速度に対して最低限の余裕を持った速度になると述べましたが、VRは35ftに到達するまでにそのV2に達するよう逆算して決定されるイメージなのです。
VRを決定する条件の詳細。VLOFとVMUとは?
それではV2と同じようにVRについても条件の詳細について見ていきたいと思います。
ですが、1つ目の「35ftまでにV2に達することができること」についてはV2に向かって逆算すればよいと先ほど述べました。
2つ目の「VMCAに対して1.05倍の余裕を持った速度以上であること」はV2の時と同じです。
V2と同様に、エンジン不作動による左右の推力のアンバランスに対処するためですが、VRの場合は1.05倍以上であることが条件になっています。
ということで残るは3つ目の条件ですが、「VLOFやVMUに対して所定の余裕を持った速度以上であること」はちょっと解説が必要かと思います。
下の図を見てください。
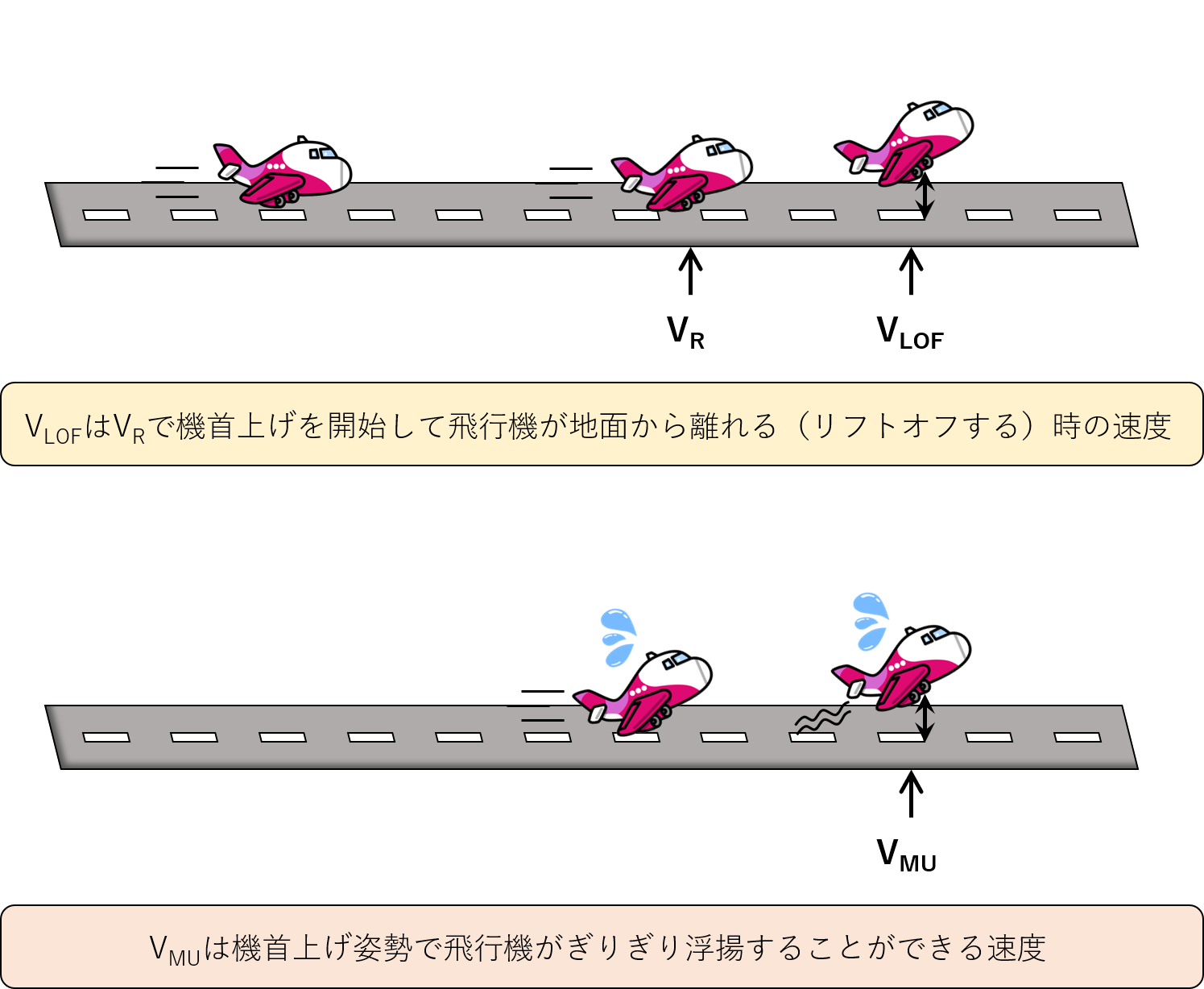
VLOFとは、VRで機首上げを行った時に実際に飛行機が地面から浮揚(リフトオフ)する時の速度を言います。
一方でVMUはMinimum Unstick Speed(ミニマムアンスティックスピード)と言って、機首上げ姿勢で飛行機が浮揚できる最小速度を指し、開発時の飛行試験で測定されるものです。
飛行機はVRで機首上げを開始して機体が地面から離れた時に、このVLOFが全エンジン作動時のVMUの1.10倍、エンジン1基不作動時のVMUの1.05倍以上でなければならないと決められているのです。
全エンジン時とエンジン1基不作動時でVMUが違うのは、全エンジン時の方が推力が大きく推力の垂直方向の力が機体のリフトオフをわずかに手助けするため、その分VMUが遅い速度になるからです。
なぜこのような条件が必要かと言えば、VRで機首上げ操作を行ったはいいものの、もしもその時にVMUに達していなければ機体は浮揚せずに非常に危険な状態に陥ってしまうからです。
このようにVRは35ftでV2に達するように逆算して算出されることを前提としつつ、VLOFやVMUも踏まえて決定されるのです。
終わりに
いかがでしたか?
少し難解だったかもしれませんが、飛行機の離陸速度はこのように様々な条件によって決められているのです。
実際の運航ではパイロットはこれらの離陸速度を、既にチャート化された性能表や性能計算ソフトを使って算出するので、その計算の中身を逐一遡るわけではありません。
ですが離陸速度がどのような条件によって算出されているかを知ることは、その速度が持つ意味を理解することに繋がるので、知識として頭に入れておくことは重要なのです。
もしも「パイロットに興味がある!」「飛行機の運航について詳しくなりたい!」という方はぜひ、VR、V2について理解を深めてみてはいかがでしょうか?
以上!