.jpg)
こんにちは。ころすけです。
前回の記事でV1の決め方の基本を解説しました。↓
2-320x180.jpg)
しかしこれはあくまで基本であって、今回はさらにV1について掘り下げてみたいと思います。
実はV1はその時々の条件でその都度変わるものなのですが、どのような時にどのように変わるのでしょうか?
さらに、近年では敢えてこれまでのセオリーとは少し違ったV1を選択する場合があるのですが、そのV1とは一体どのようなものなのでしょうか?
さっそく始めましょう。
【おさらい】V1の基本はBalanced V1。
まずは始めにV1の基本についておさらいしておきましょう。
V1とは離陸滑走中にエンジンが1基故障した場合、離陸を中止するか継続するかの判断が切り替わる速度のことです。
エンジンが故障するタイミングがV1よりも遅い速度であれば離陸を中断し、V1よりも速ければ離陸を継続するわけです。
一般的にこのV1は離陸を中断する場合の加速停止距離(Accelerate Stop Distance)と継続する場合の離陸距離(Accelerate Go Distance)がちょうど等しくなる速度が選ばれます。
これがBalanced V1です。
Balanced V1を選ぶ理由は、最低限必要となる滑走路の長さ(必要滑走路長)を最も短くすることができるからです。
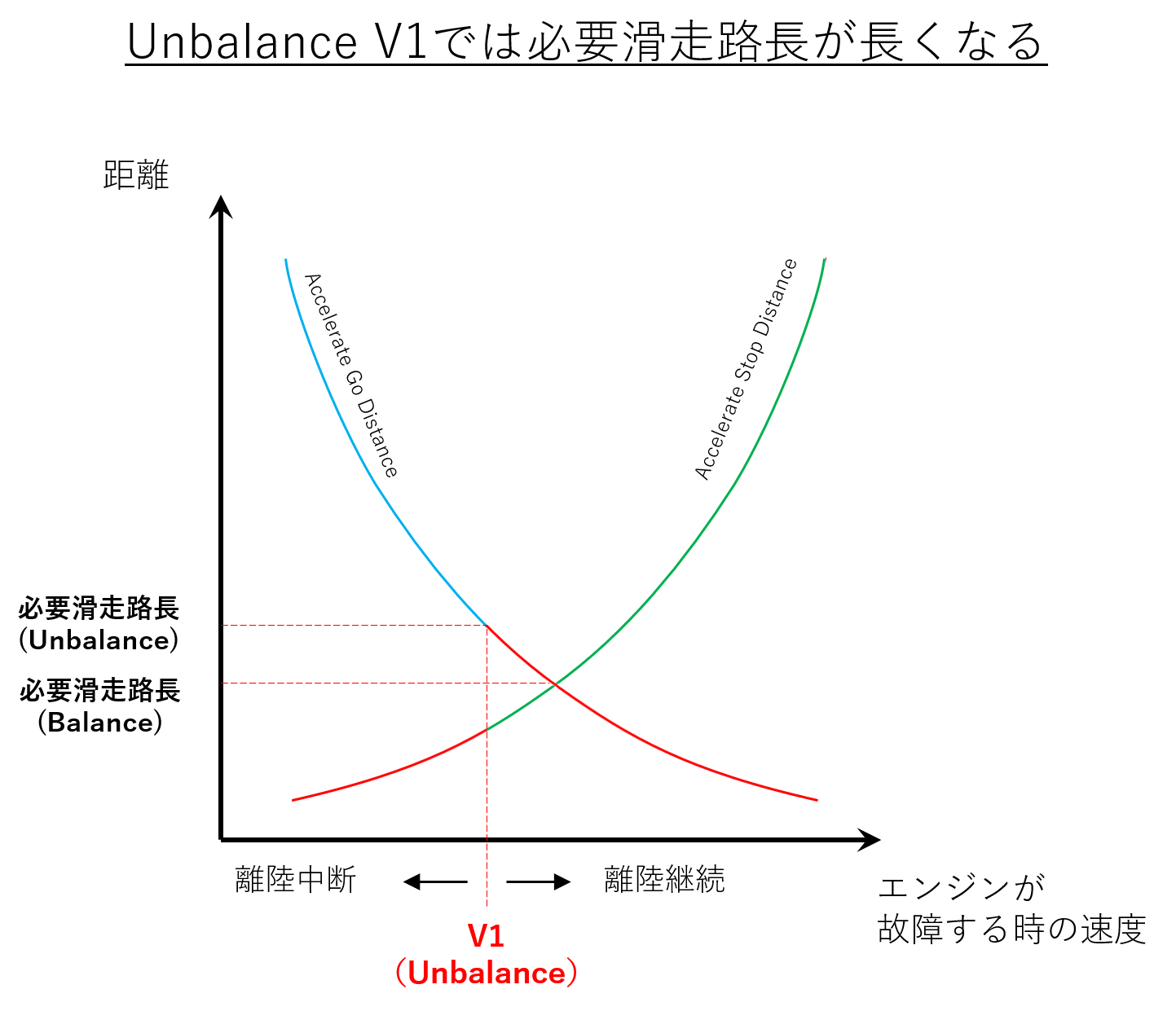
滑走路の長さは、飛行機が離陸滑走中のどのタイミングでエンジンが故障したとしても対処できる長さが必要です。
上の図のようにAccelerate Stop DistanceとAccelerate Go Distanceが等しくならない速度をV1とした場合、必要滑走路長は長くなってしまいます。
Balanced V1を選択しておけば、滑走路が短い空港であっても運航できる可能性が高くなるというわけです。
運航条件が変わった場合、V1はどのように変化する?
V1の基本をおさらいしたところで、ここからはもう少し深い考察をしてみましょう。
具体的には「運航条件が変化した場合、V1はどのように変化するのか?」についてです。
今回は「その1:通常よりも弱い推力を使った場合」、「その2:追い風が強い条件での離陸の場合」を例題として用意しました。
その1:通常よりも弱い推力を使った場合
飛行機が離陸する際に使う推力は「離陸推力」と呼ばれますが、この離陸推力は最大のものから数段階弱い推力まで、その日の条件に応じて選択が可能です。

さて、通常よりも弱い離陸推力を使う場合、V1の値は元の推力の時と同じでよいのでしょうか?それとも変えなければいけないのでしょうか?
このような変化を考える場合も、Accelerate Stop DistanceとAccelerate Go Distanceがどのように変化するのかを考えます。
弱い離陸推力を使うわけですから、全体的に所定の速度に達するまでの距離は長くなりますので、Accelerate Stop DistanceもAccelerate Go Distanceのどちらも長くなります。
ところが、どちらの方がより長くなるのかを考えるとStopとGoで差が出るのですが、実はこれが重要なポイントになります。
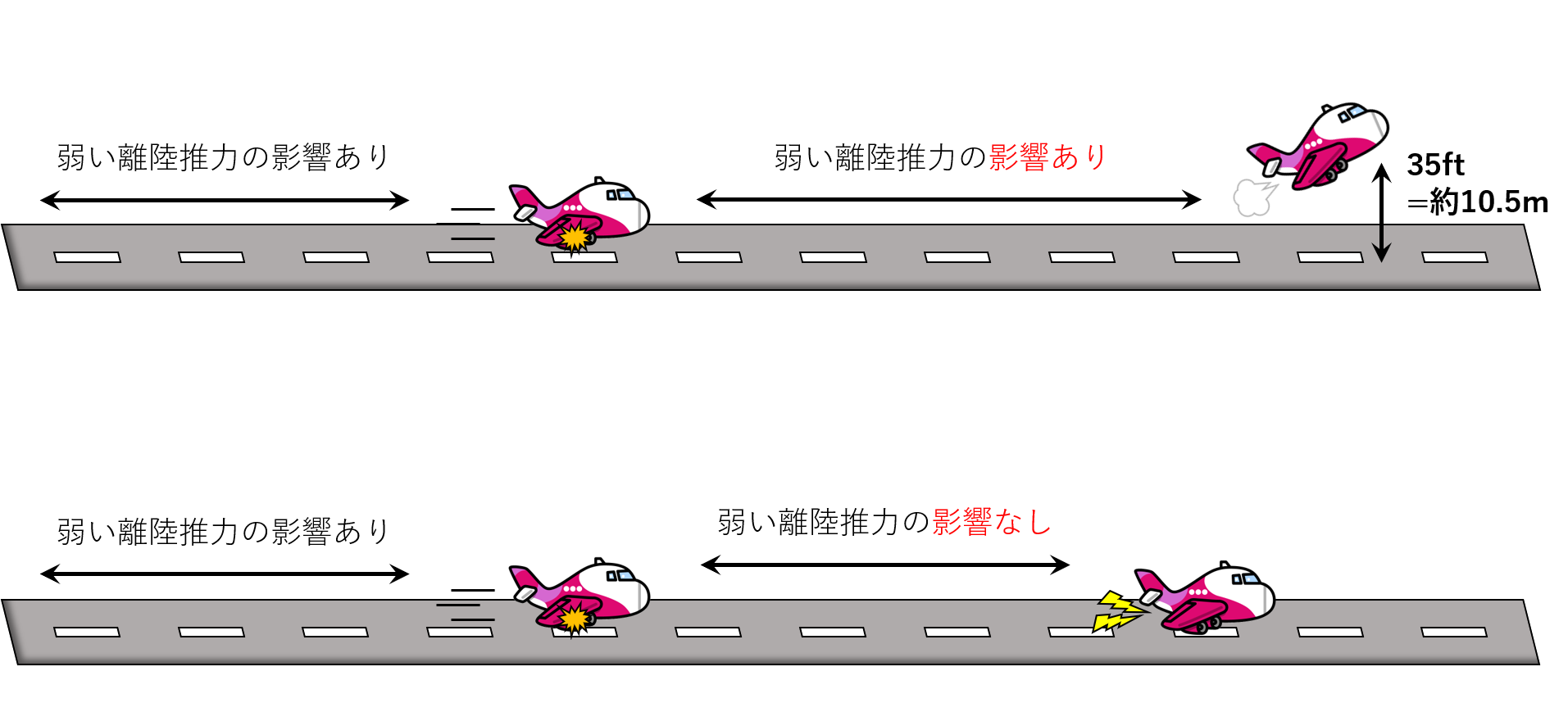
下の図を見てください。
Goの場合はエンジンが故障した以降も弱い推力で加速を続けないといけないのに対し、Stopの場合は減速を始めた以降、使う推力の大きさによる違いはなくなります。
離陸推力の差が出るのは加速時の話であって、減速する時はどのような場合でも推力を最小まで絞るからです。
これをグラフで表すと、下の図のようになります。
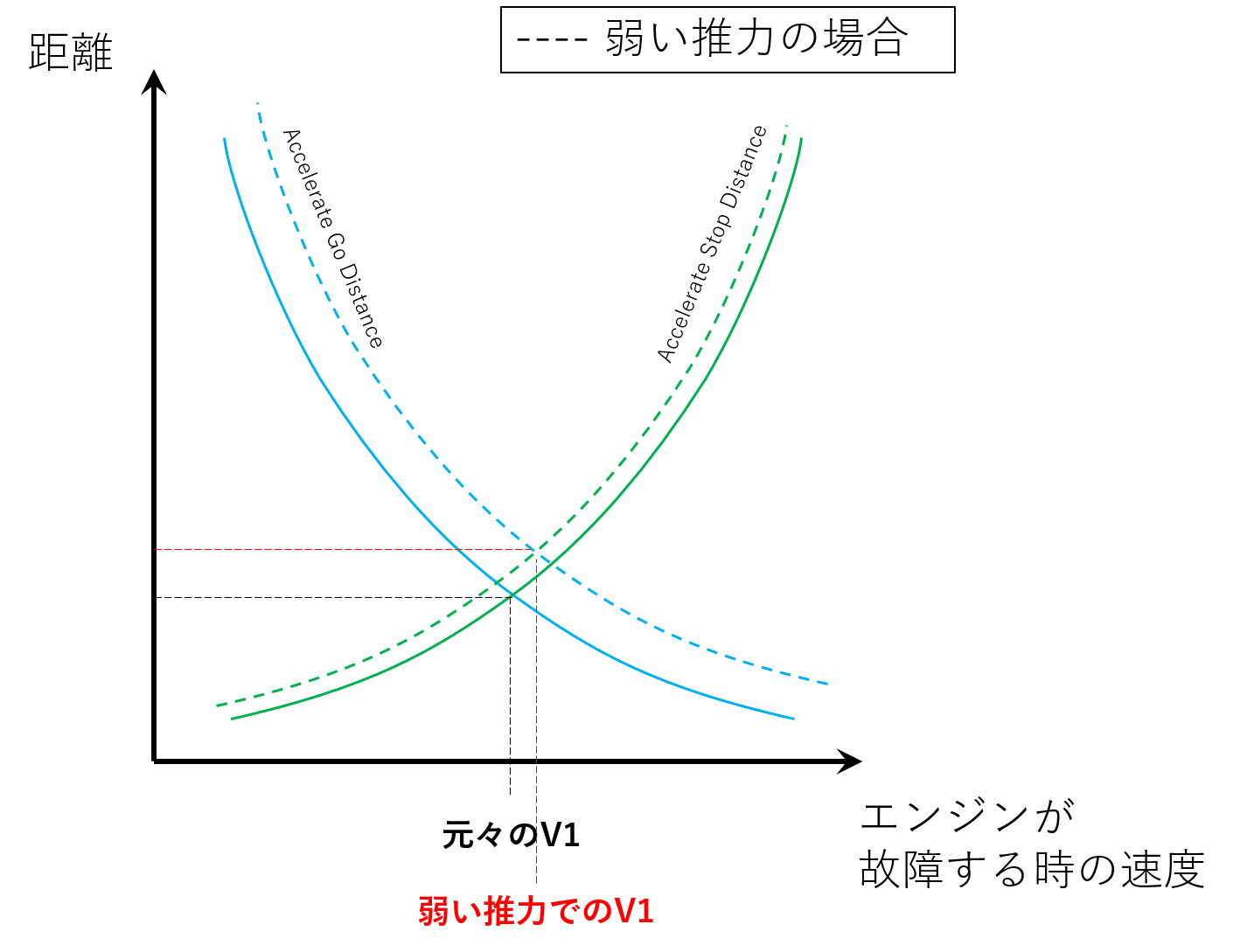 GoもStopも距離が長くなるのは同じですが、Goの距離の伸びの方が長い分、新たにBalanceする速度は元々のBalanced V1よりも速くなっていることが分かります。
GoもStopも距離が長くなるのは同じですが、Goの距離の伸びの方が長い分、新たにBalanceする速度は元々のBalanced V1よりも速くなっていることが分かります。
実は使う離陸推力を弱くすると一般的にV1の値は速くなるのですが、その理由はStopとGoのそれぞれの距離で影響度が異なるからなのです。
その2:追い風(Tail Wind)が強い条件での離陸の場合
では続いて、当初の条件よりも追い風が強い場合について考えてみましょう。
飛行機の離陸速度は吹いている風に対しての速度になりますから、追い風が吹いている場合はその分地上から見た速度はより速くなければいけません。
つまり離陸推力を弱めた時と同様に、StopもGoも追い風がない場合に比べて長くなるのです。
問題はStopとGoのどちらの距離がより影響を受けるかなのですが、下の図を見てください。
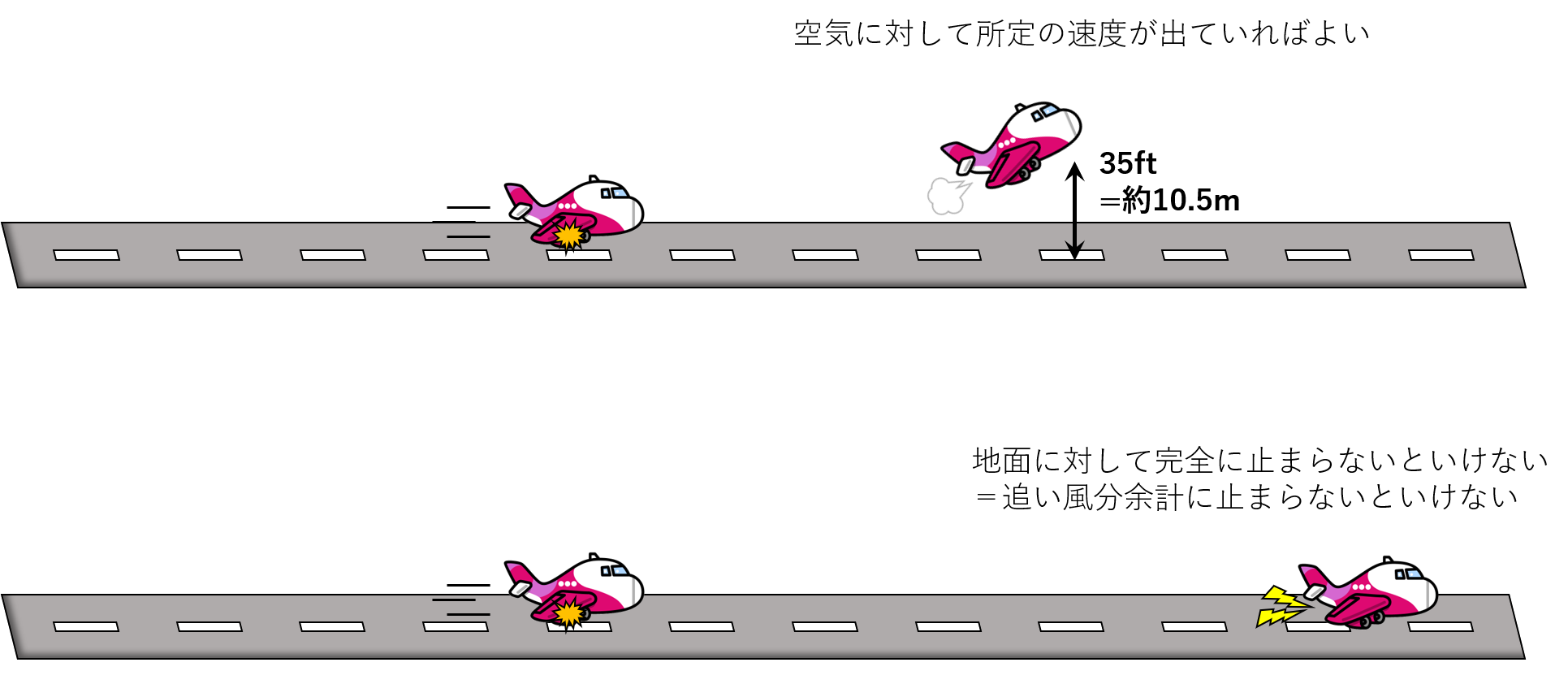
Goの場合は離陸するまで常に空気に対する速度のみを考えればよいのですが、Stopの場合は最終的に止まったと判断されるのは地面に対しての速度で考えなければなりません。
つまり、Stopの場合は追い風の分さらに余計に止まらないといけなくなるのです。
これをグラフで表すと、今度は下の図のようになります。
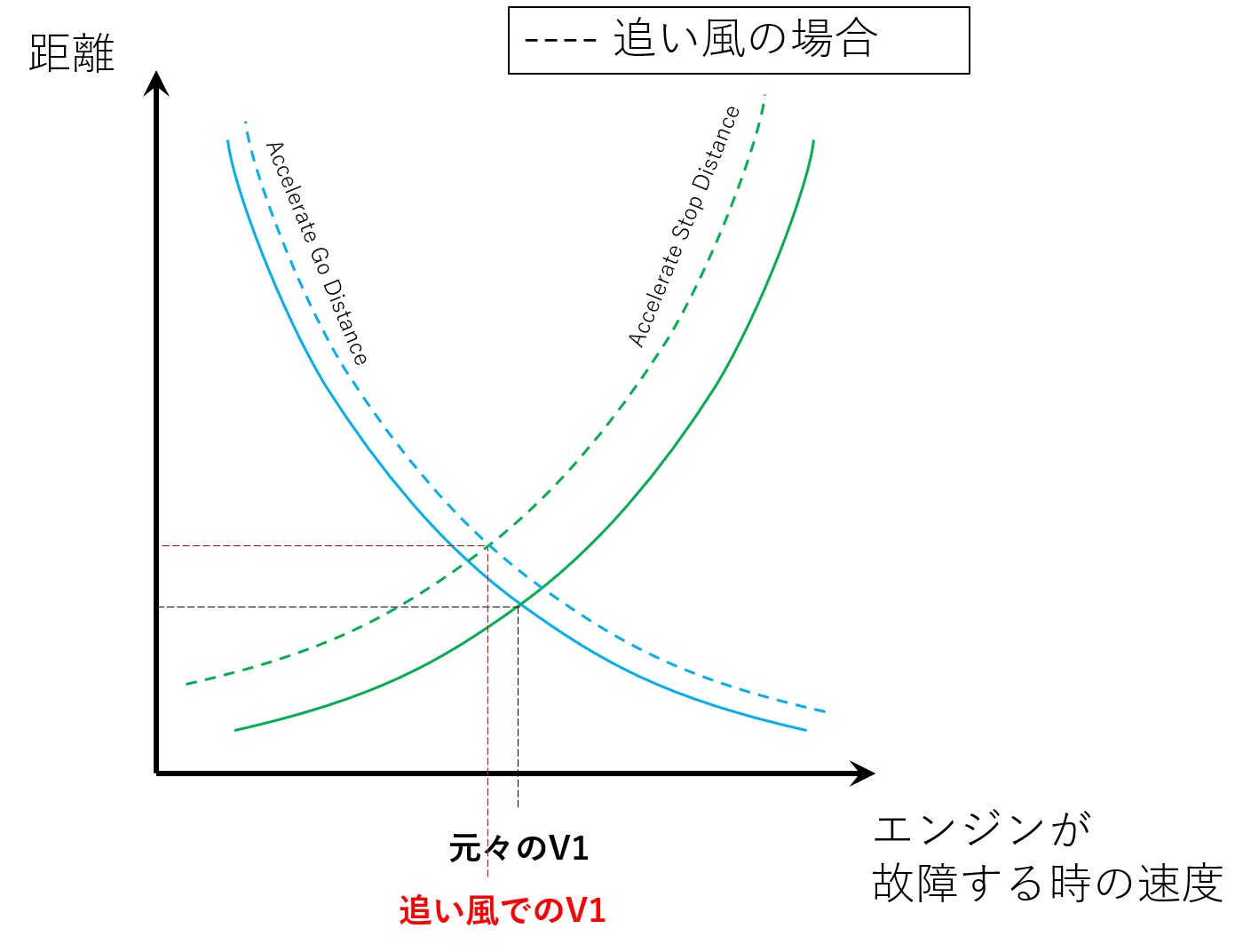
今度はGoよりもStopの距離の伸びが長くなった結果、新しくBalanceするV1は元々のV1よりも遅くなっていることが分かります。
つまり追い風の場合は、一般的にV1は遅くなる傾向にあるのです。
V1は遅くなっていますが、必要な距離(赤破線の高さ)は元々の条件よりも長くなっています。
Balanced V1はあくまでGoとStopが等しくなる速度であるだけで、V1が小さいからと言って必要な滑走路の長さが短くなるわけではないのです。
このようにV1は運航条件によって変化するのですが、どのように変化するのか考える際、GoとStopの場合でどちらがより影響を受けるのかを考えるとイメージが掴みやすくなるのです。
敢えてUnbalanceを選択する場合がある!? Optimum V1とは。
今度は少し違った発想のV1について考えてみましょう。
ここまで、基本的にV1はGoとStopが同じ距離になるBalanced V1を選択すると解説しました。
しかし、状況によっては敢えてBalanced V1ではなく、Unbalanced V1を使った方が都合が良い場合があるのです。
まずは下のグラフを見てください。
下のグラフでは、選択するV1を敢えてBalanced V1よりも少し速い速度にしています。
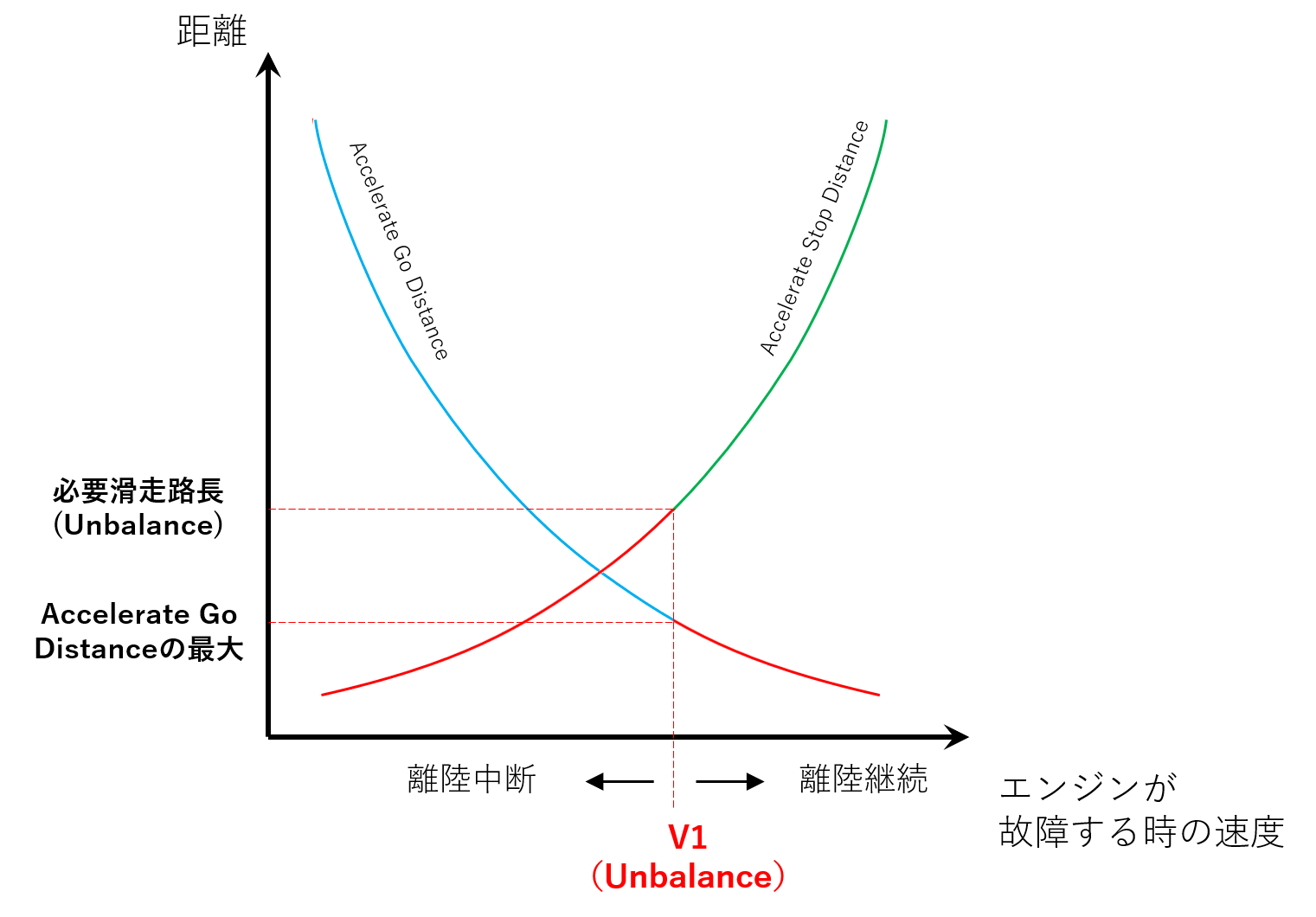
少し速いV1を選択している分、必要滑走路長は当然Balanced V1を選択した時よりも長くなっています。
つまり、その分だけ長い滑走路が必要になるということです。
ですが一方、Accelerate Go Distanceのみに注目すると、最もAccelerate Go Distanceが長くなるのはちょうどV1でエンジンが故障する時であるのは同じですが、その最大値はBalanced V1の時よりも短くなっていることが分かります。
さらに下の図を見てください。
もしも滑走路の長さがBalanced V1の必要滑走路長以上確保できている場合で、前方に障害物があるような空港であったとしたらどうでしょうか?
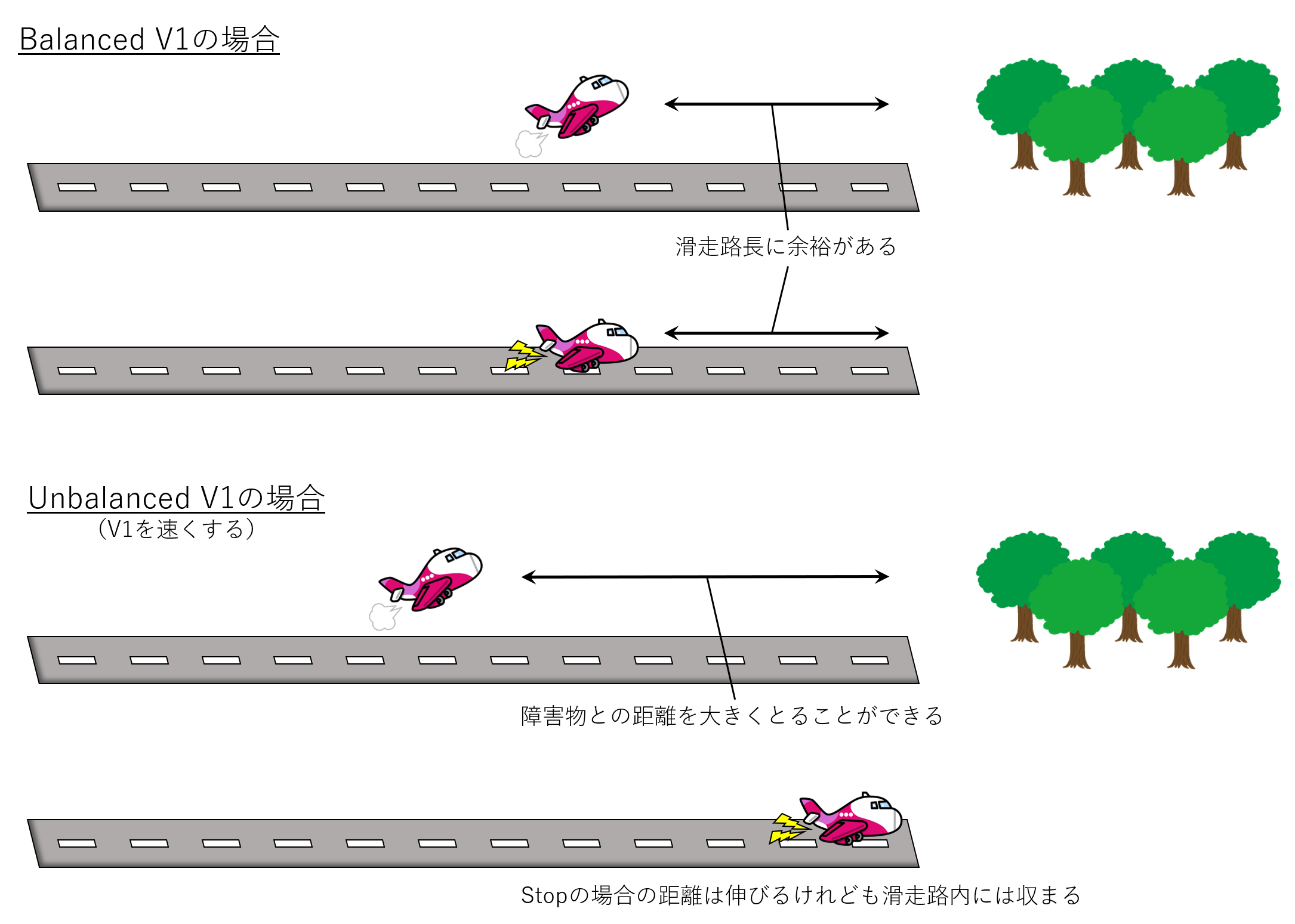
実は飛行機には滑走路の長さ以内で離陸や停止ができなければならないという条件がある一方で、上昇中に滑走路の外にある障害物を所定の高度余裕をもって飛び越えなければならないという制限もあるのです。
この場合、遅い速度でエンジンが故障した場合に離陸を継続をしてしまうと、上昇フェーズに移行した際に障害物との距離が近くなってしまいます。
なるべく速い速度をV1として選択することで、前方の障害物を飛び越えやすくすることができるのです。
当然、離陸を中断した場合に停止するまでの最大距離はBalanced V1を選択した時よりも長くなってしまいますが、元々Balanced V1の条件では滑走路長に余裕があったわけですから問題がないというわけです。
このようにBalanced V1にこだわるのではなく、総合的に最適な条件から選択されたV1のことをOptimum V1と呼びます。
かつてはV1の算出はコックピットに搭載された図や表を用いていたため、あまり複雑な計算ができず、常にBalanced V1を選択することが一般的でした。
しかし最近では、タブレット端末やコックピットに搭載されたコンピューターにより条件をより細かくした計算ができるようになり、Optimum V1を使った離陸が主流になりつつあります。
終わりに
いかがでしたか?
少し難しかったかもしれませんが、V1がいかに奥が深いものであるか感じ取っていただけたのではと思います。
V1についてはまずは入門編の内容を理解するだけで十分ですが、興味がある方は是非とも上級編の内容もマスターできるようにチャレンジしてみてはいかがでしょうか?
以上!