2.jpg)
こんにちは。ころすけです。
みなさんはV1やVR、V2といった用語を聞いたことはあるでしょうか?
これは飛行機が離陸する時に使う「離陸速度」を表す言葉で、離陸滑走で加速を始めてから順にV1、VR、V2という速度を通過し、飛行機は最終的にV2よりも少し速い速度で上昇姿勢に移っていきます。
今回はこのV1、VR、V2のうちV1(離陸決心速度)について、その意味と決め方を解説したいと思います。
飛行機の離陸はエンジン故障が前提条件。V1は離陸の中断 or 継続を判断する分かれ目。
まず始めに、飛行機の離陸速度を決める際には大前提となる大切な条件があります。
それは、「離陸滑走中に必ずエンジンが1基故障すると想定すること」です。
飛行機の離陸にとって最悪のケースは途中でエンジンの推力が失われてしまうことです。
このような最悪のケースであっても何とか対処できるように、予め想定する必要があるのです。
さて、必ずエンジンが故障することを前提条件として、続いて以下の2つのケースについて考えてみます。
ケース①:離陸滑走開始直後にエンジンが1基故障した場合
ケース②:離陸滑走で十分に加速し、機首上げ直前にエンジンが1基故障した場合
まずはケース①の場合を想像してみてください。
離陸滑走開始直後にエンジンが故障するわけですから、この時点では飛行機の滑走速度はそれほど速くはないはずです。
また、離陸開始位置から進んだ距離もわずかでしょうから、目の前には十分な長さの滑走路が残っていることが想像できるかと思います。
このような場合、あなたならどうするでしょうか?
おそらくすぐさまブレーキを踏んで、機体を停止させようとするはずです。
このように離陸開始直後にエンジンが故障した場合は、速やかに離陸を中断して機体の停止操作に移るのが安全な判断であるということが分かります。
一方でケース②の場合はどうでしょうか。
機体はまさに離陸しようとするほどに加速しているわけですから、当然速度は速いですし、この速度に加速するまでに既に滑走路のかなりの部分を進んでいることがイメージできるかと思います。
この場合はブレーキを踏んで機体を停止させようとしても、滑走路内で停止できる保証はありません。
実は飛行機はエンジンが1基不作動の状態であっても離陸できるだけの推力が確保されているのですが、このような場合では無理に停止しようとせずに、むしろ離陸を継続して一旦上昇してしまった方が安全です。
地上の障害物の影響が及ばない高度まで一旦上昇した後に、落ち着いて出発地空港に引き返せばよいのです。
このようにケース①と②を考えると、速度が遅い場合はブレーキを踏んで離陸を中止した方が安全であり、逆に速度が速い場合は離陸を継続した方が安全と判断されることが分かります。
実際にはエンジンが故障するタイミングが滑走路中のどこになるかは分かりませんから、全てのタイミングについて考える必要があるのですが、そうするとどこかで離陸中断と離陸継続の判断が切り替わるタイミングの速度があるはずです。
このタイミングの速度こそがV1であり、離陸決心速度と呼ばれる所以なのです。
V1よりも手前でエンジンが故障すれば離陸中断、V1よりも後でエンジンが故障すれば離陸継続という具合に判断できるのです。

このようにV1は離陸中止 or 離陸継続の判断に非常に重要な速度になるので、2人のうち操縦をしていない方のパイロット(PM:Pilot Monitoring)はコックピットの速度計をチェックし、機体の速度がV1に達すると「ブイワン!」とコールするように手順が決まっています。
このコールに対して操縦を担当しているパイロット(PF:Pilot Flying)は、必ず「チェック!」と返答をして、機体がV1の速度に達したことを相互に確認し合うのです。
V1の決め方。まずは離陸中断と離陸継続の場合それぞれで考えてみよう。
それでは今度は、どのようにしてV1の速度が決まるのかを具体的に考えてみましょう。
先ほどの話から、要するにエンジンが故障した際に離陸を中断すべきか、継続すべきかの判断が切り替わるタイミングを導き出せば良いわけです。
そのためには離陸を中断する場合と継続する場合それぞれで、エンジンが故障するタイミングを変えるとどうなるのかを考える必要があります。
離陸を中断する場合
まずは離陸を中断する場合を考えてみましょう。
先ほどのケース①のように、離陸滑走開始直後にエンジンが故障したと想定する場合は、比較的短い距離で機体は停止すると想像できるかと思います。
ですが、ある程度加速した後にエンジンが故障した場合はどうでしょうか?
この場合はまず加速するまでに前に進んでいるでしょうし、速い速度から減速するわけですから、ブレーキを踏んで止まるまでにも距離が必要になります。
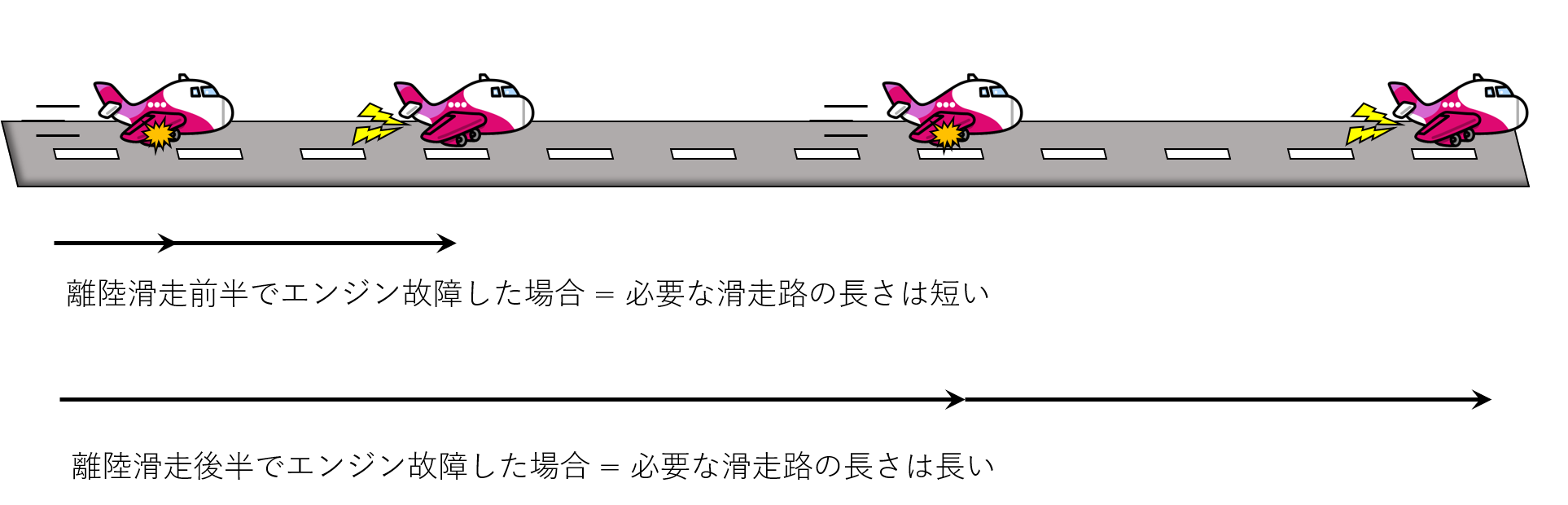
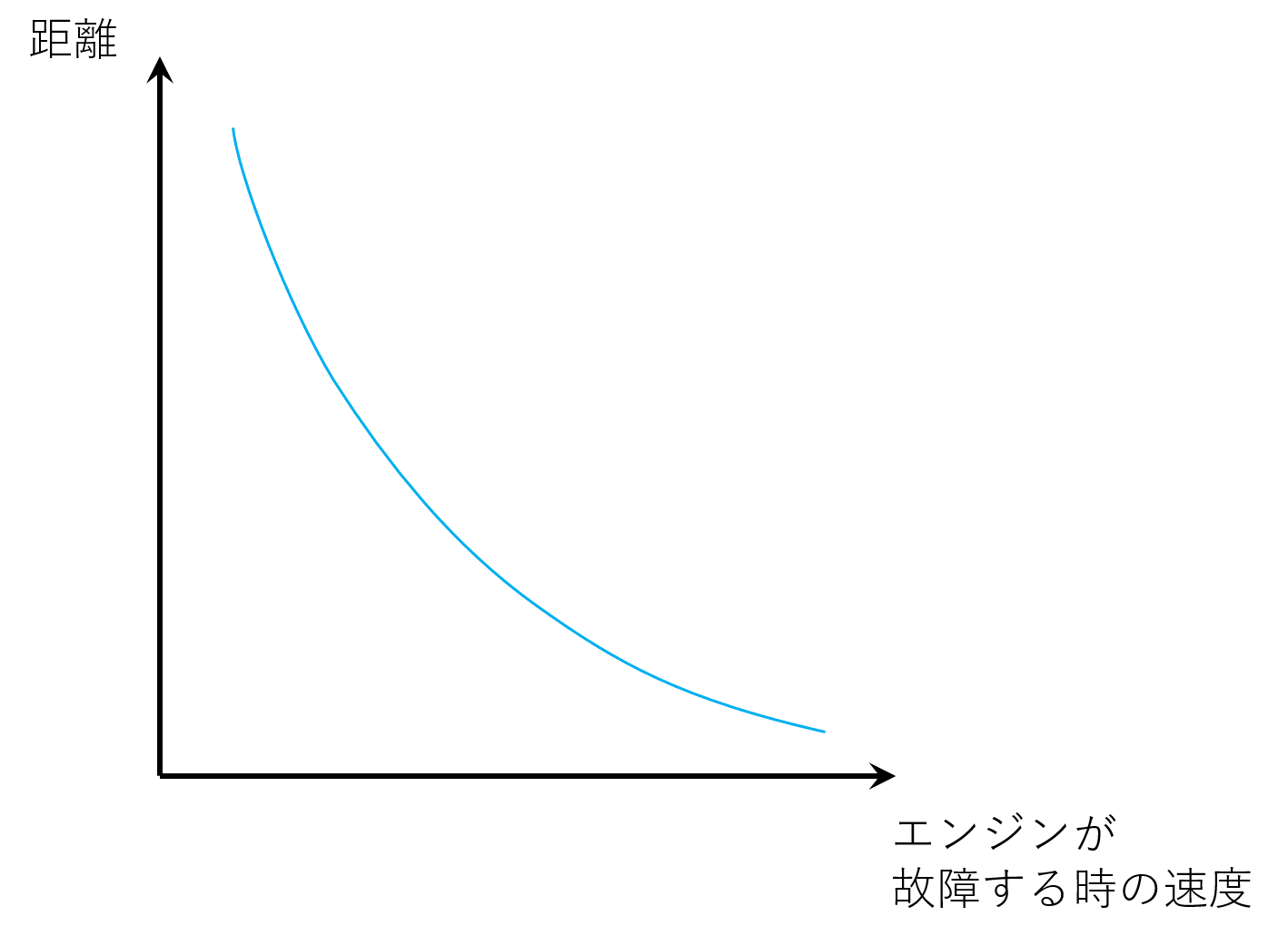
このように離陸を中止した場合に完全に停止するまでの距離のことを加速停止距離(Accelerate Stop Distance)と言うのですが、エンジン故障が離陸滑走の後半になるほど加速停止距離は長くなります。
これをグラフで描くと下の図のようになります。
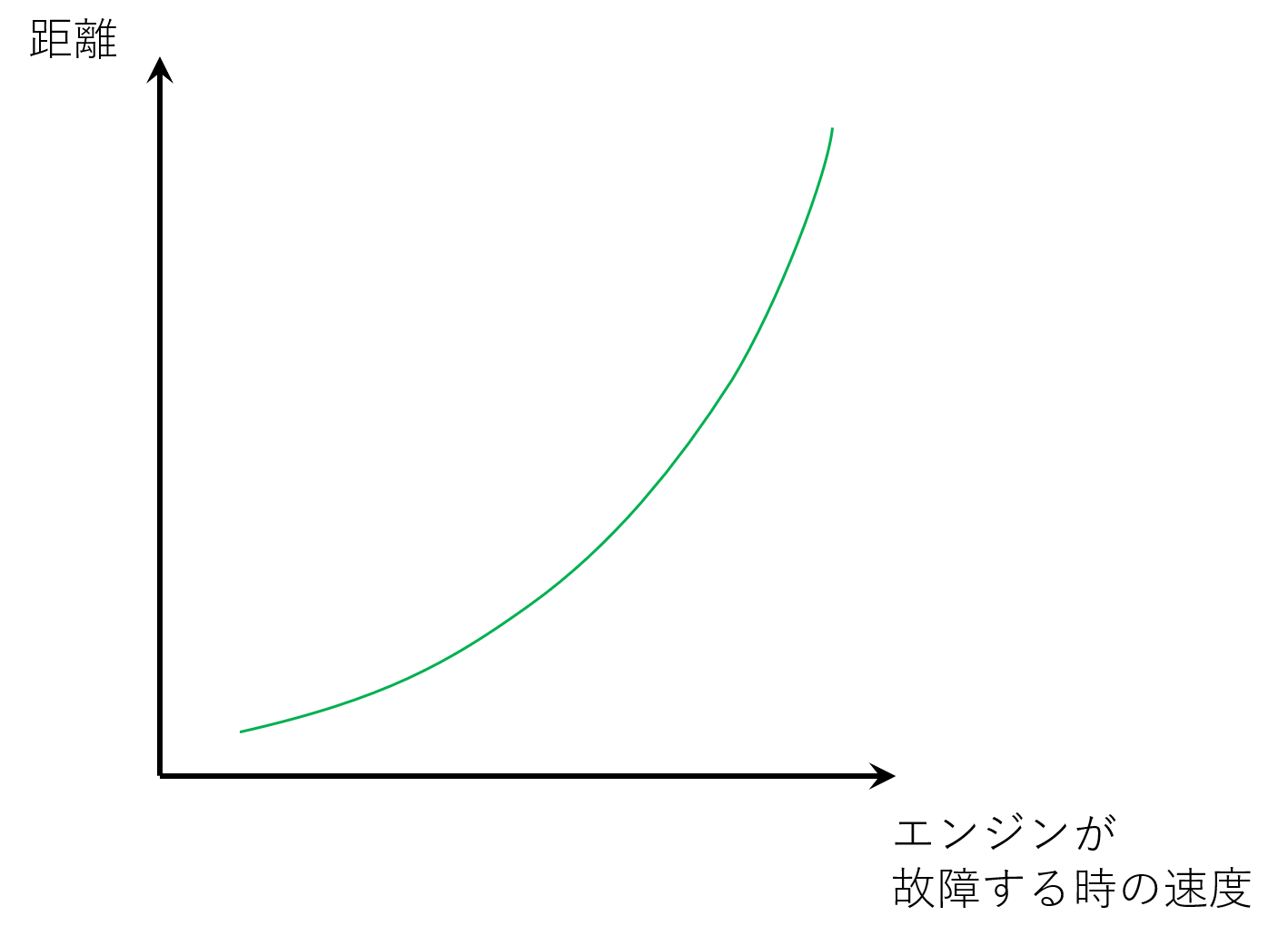
当然ですが、エンジンが故障する時の速度が速ければ速いほど停止するまでの距離は右肩上がりで長くなっていきます。
余談ですが、離陸を中断して停止を試みることを業界用語ではRTO(Reject Takeoff)と言います。
速度が速い段階でのRTOには十分な長さの滑走路が必要になるというわけです。
離陸を継続する場合
続いて、離陸を継続する場合を考えてみましょう。
ポイントは、離陸を継続する場合はたとえエンジンが1基故障していたとしても、所定の機首上げ速度まで加速しないといけないという点です。
なので既にある程度加速している段階でエンジンが故障した場合は、残りのエンジンのみで加速する区間は短くなります。
一方、ほとんど加速していない段階でエンジンが故障した場合は、残りのエンジンのみで加速する区間は長くなります。
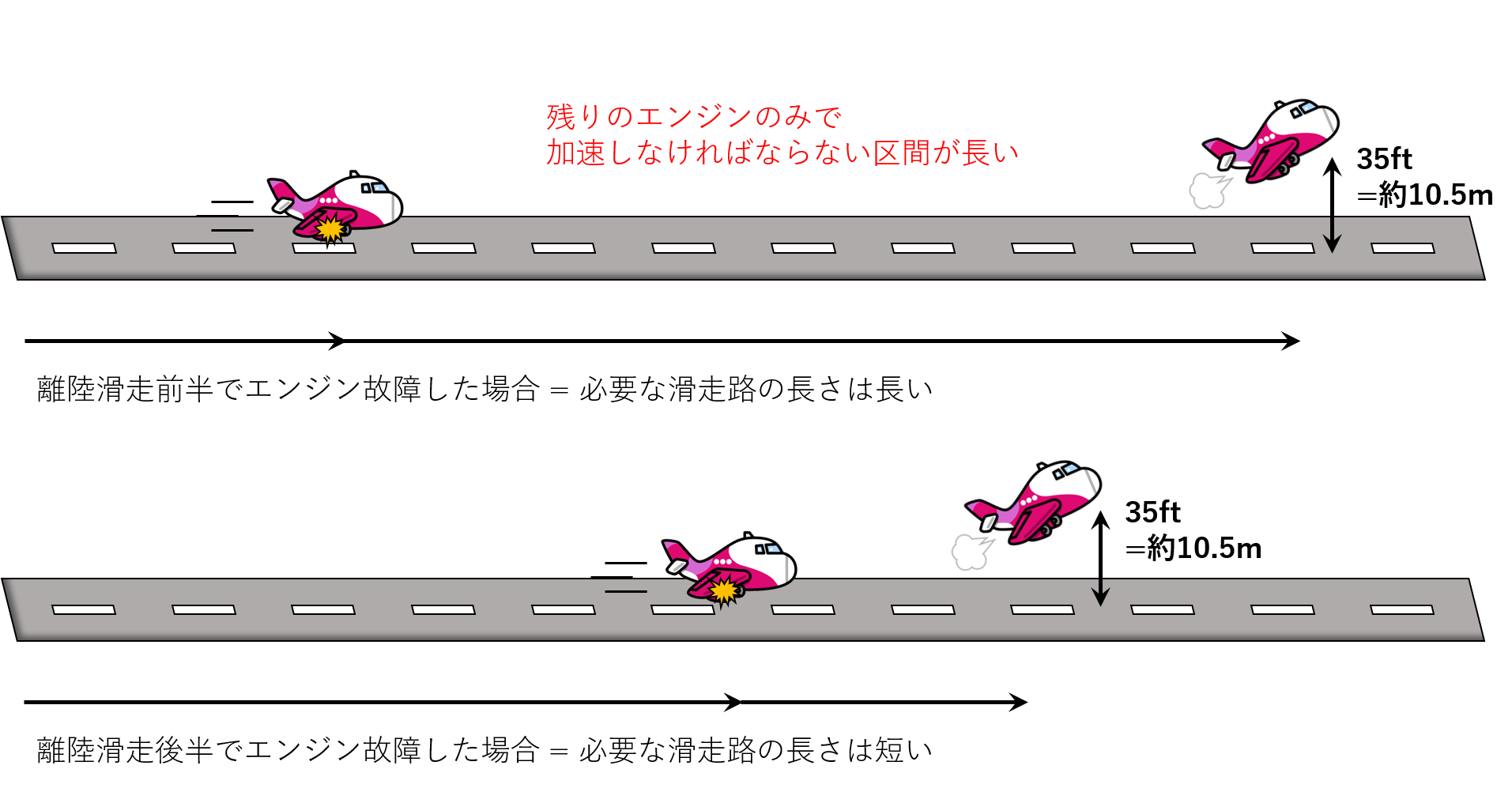
離陸を継続した場合、「飛行機が離陸した」とみなせるのは滑走路上35ftの高さまで浮揚した地点と決まっています。(湿った滑走路や積雪に覆われた滑走路では15ftでOK)
このように離陸を継続した場合に浮揚地点までに要する距離のことを離陸距離(Takeoff Distance)と言いいます。
この離陸距離は先ほどの加速停止距離(Accelerate Stop Distance)と対比して特にAccelerate Go Distanceと呼ばれたり、より正確にOne Engine Takeoff Distanceとも呼ばれます。
この離陸距離は加速停止距離とは逆にエンジンが故障する時の速度が速ければ速いほど短くなりますので、下の図のように右肩下がりのグラフになります。
V1は必要な滑走路長が最も短くなる速度を選ぶ。
これらを踏まえて「結局V1はどうやって決まるのか?」について考えてみましょう。
ある時点でエンジンが1基故障した際、もしもパイロットに離陸を中断するか継続するか選択肢がある場合、どちらを選択した場合であっても与えられた滑走路の中で停止もしくは離陸を完了できなければなりません。
すなわち必要な滑走路長は、その速度における離陸距離と加速停止距離のうち、どちらか長い方で考えなければいけないのです。
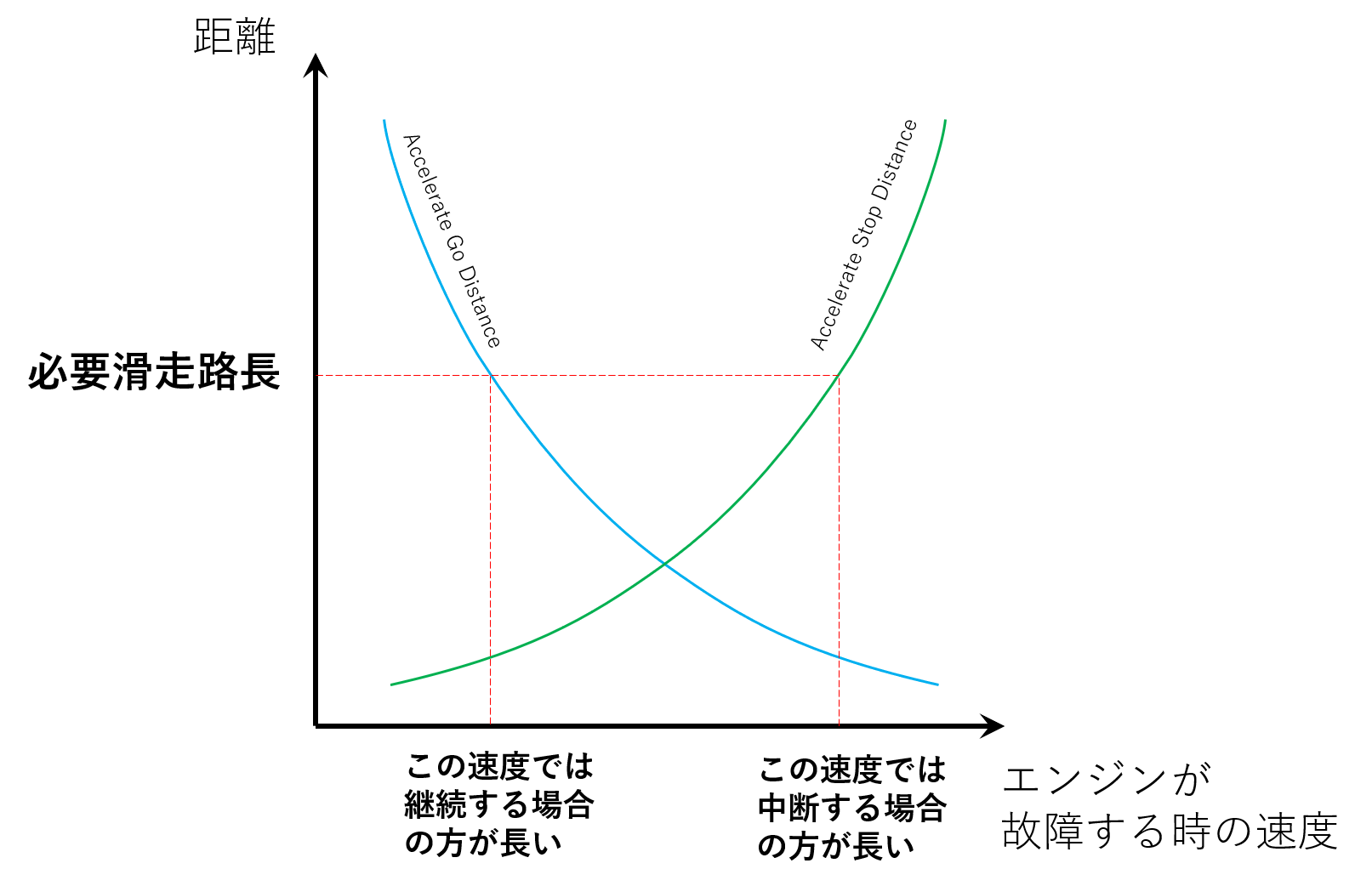
ではここでもし、ある速度以下では離陸を中断、ある速度以上では離陸継続とするような速度を決めたらどうでしょうか?
このある速度は自由に決められますが、下の図のようにちょうど加速停止距離(Accelerate Stop Distance)と離陸距離(Accelerate Go Distance)が等しくなる速度を選んだとします。
そうすると、必要滑走路長はちょうどそのある速度の時に最大になって、それ以外では短くなることが分かります。
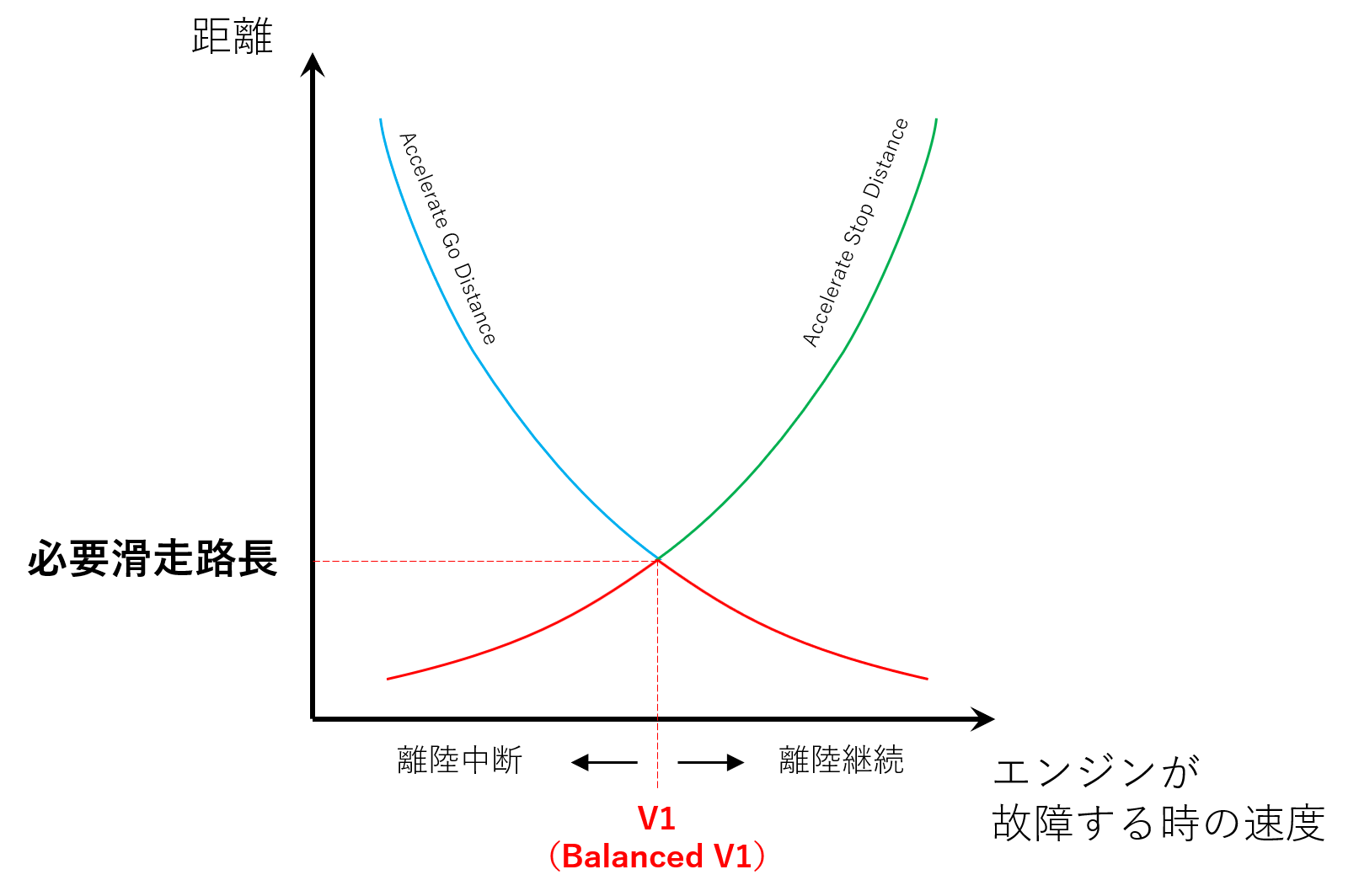
この「ある速度」こそがまさにV1であり、このようにしてAccelerate Stop DistanceとAccelerate Go Distanceが等しくなる条件から選択したV1のことを特にBalanced V1と呼びます。
こうすればパイロットは実際に離陸滑走中にエンジンが故障した場合でも、このBlanced V1を超えているかいないかを判断するだけで、必要滑走路長以内の離陸中断 or 離陸継続をすることができるのです。
このように飛行機の運航では、基本的にBlanced V1で事前に必要滑走路長を算出し、滑走路がそれよりも長ければ運航可能、短ければ運航不可と判断しているのです。
終わりに
いかがでしたか?
V1については言葉自体は聞いたことあるものの、その意味や決定方法までは知らないという方も多かったのではないでしょうか?
V1は非常に奥が深く、パイロットになるための勉強でも1つの関門と言えるほど重要なものですが、基本的な考え方は今回お話したとおりなのです。
一度の解説で100%理解することは難しいかと思いますが、「将来パイロットになりたい!」、「飛行機について詳しくなりたい!」と思う方はぜひ、繰り返し読んで理解を深めてみてはいかがでしょうか?
以上!
-320x180.jpg)